5.15. Exercise: HC-SR04#
Instructions
Read the case study on Case Study: HC-SR04 Ultrasonic Sensor.
Question 1
Answer the following:
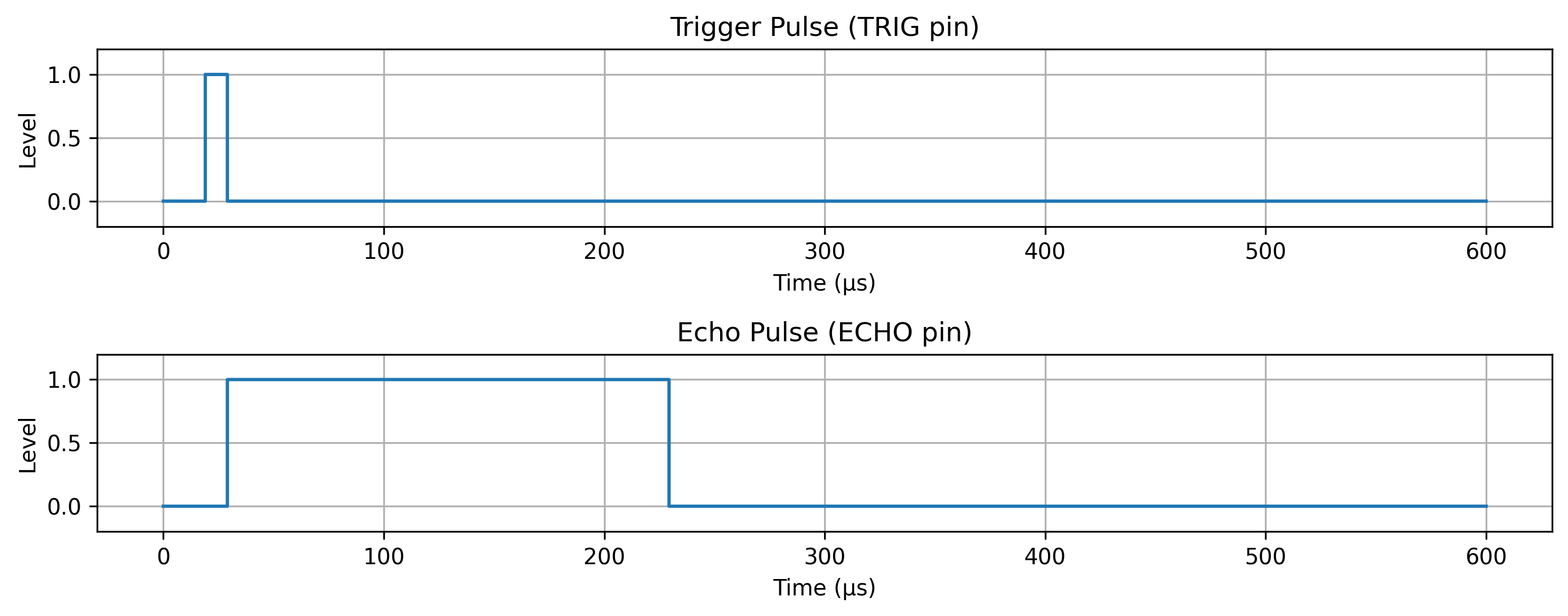
Draw the pin states over time when a measurement is triggered.
You may wish to draw over the blank plots provided below.
Solution
Question 2
Answer the following:
Create a wiring diagram of the sensor connected to your microcontroller using Wokwi.
Solution
Solution is locked
Question 3
Answer the following:
Annotate the provided MicroPython code to match the steps outlined on the case study.
Note
The code provided is for the micro:Maqueen robot. You may need to adjust the pins used for your particular robot.
import utime
def ultrasound_measure():
pin1.write_digital(1)
utime.sleep_us(10)
pin1.write_digital(0)
timeout = utime.ticks_us()
while True:
pulseBegin = utime.ticks_us()
if 1 == pin2.read_digital():
break
if (pulseBegin - timeout) > 5000:
return -1 # error: no echo start detected
while True:
pulseEnd = utime.ticks_us()
if 0 == pin2.read_digital():
break
if (pulseEnd - pulseBegin) > 5000:
return -2 # error: echo too long (timeout)
x = pulseEnd - pulseBegin # time in µs
d = x * 0.01715 # distance in cm
return int(d)
while True:
dist = ultrasound_measure()
if dist >= 0: # only process valid readings
print(dist)
sleep(100)
Solution
Solution is locked
Question 4
The measurements from the HC-SR04 can be noisy.
Extend the code so that:
the distance is smoothed using a moving average
small changes are suppressed with deadband
Solution
Solution is locked